



RoScan - Robotic 3D Scanner
Robotic 3D scanner is novel medical imaging modality allowing to capture computer 3D models of patient's part of body with submillimetre resolution. It is developed within CEITEC, the research centre of Brno University of Technology.
Principle
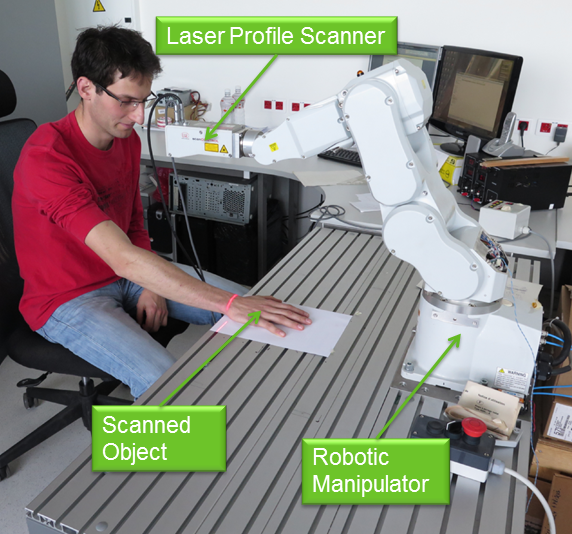
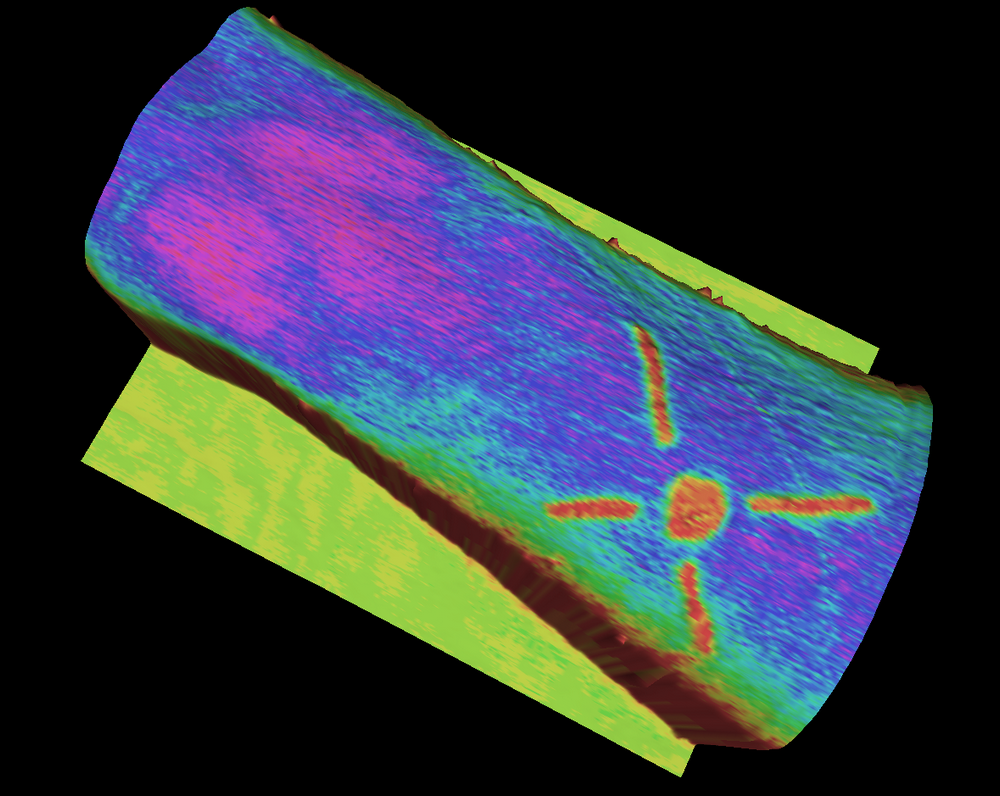
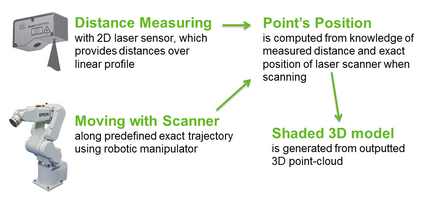
Merasuring distances from known place and direction allows to determine exact position of measured point. From cloud of these 3D points, 3D model of patient can be computed and examinations can be performed.
These models can be compared during time to supervise recovery process, physiological parameters can be measured or centre of malfunction can be detected.
What is it good for?
Robotic 3D Scanner is an alternative to Magnetic Resonance Imaging in special cases, where information required for examination is not the whole 3D model of afflicted part of body, but only its surface. In these cases, Robotic 3D Scanner, a device specially developed for these situations, can provide at least the same quality of resulting 3D scan in much faster time and with significantly lower expenses. In most cases, the result reaches the higher resolution than MRI and brings higher comfort for patient.
Entire research contributes to optimization of public health care operation by avoiding expensive examinations, which could be performed in cheaper and smarter way. This research was performed on behalf of St. Anne's University Hospital Brno, where application of proposed Robotic 3D Scanner is planned.
Relevant software
Essential part of this project are software packages developed for 3D model capturing and analyzing:
- RoScan 3D - Software for capturing and saving 3D models using Robotic 3D scanner.
- RoScan Analyzer - Software for analyzing models scanned by RoScan 3D software.
More information
Here are all public documents about this project for download:
- Presentation of project from PDES conference briefly describes advantages of this device and presents principles of point computation. [1.7 MB]
- Poster from ABB University competition where first part of this project (made as my master thesis) has been presented. [1.8 MB]
- Brief leaflet in Czech language describing results of my master thesis. [1.1 MB]
- Simple article in Czech language informing about this project in popular form for entire public. Published in 21.stoleti and Udalosti na VUT journals. [322 kB]
- Abstract from fyzio conference in Czech language, dealing with reasons why to use this device in physiotherapy. [287 kB]
- Lecture from fyzio conference in Czech language, presenting this device, its principle and advantages to medical experts.[1.6 MB]
More detailed informations can be found at relevant publications, which some of them are OpenAccess.
Relevant Publications
 |
Journal Article Robotic 3D Scanner as an Alternative to Standard Modalities of Medical Imaging CHROMÝ, A.; ŽALUD, L. |
|
Journal Article Novel 3D Modelling System Capturing Objects with Sub-Millimetre Resolution CHROMÝ, A.; ŽALUD, L. |
|
Journal Article Application of High-Resolution 3D Scanning in Medical Volumetry CHROMÝ, A. |
 |
Conference Paper High-Accuracy Volumetric Measurements of Soft Tissues using Robotic 3D Scanner CHROMÝ, A. |
|
Conference Paper Creating Three-Dimensional Computer Models Using Robotic Manipulator and Laser Scanners CHROMÝ, A.; KOCMANOVÁ, P.; ŽALUD, L. |
 |
Software RoScan 3D - software for 3D model capturing using robotic 3D scanner CHROMÝ, A. |
|
Software RoScan Analyzer - 3D model measurements and analysis CHROMÝ, A. |
|
Conference Paper Multi-modal 3D Scanning for Medical Purposes CHROMÝ, A. |
|
Conference Paper Optimalizace léčby užitím robotického 3D skeneru CHROMÝ, A.; ŽALUD, L. |
 |
Lecture 3D skenování těla pacienta a jeho přínos pro fyzioterapii CHROMÝ, A.; ŽALUD, L. |
|
Lecture Snímání počítačových modelů lidského těla a jejich užití ve fyzioterapii CHROMÝ, A.; ŽALUD, L. |
Acknowledgement
This work was supported by the projects CEITEC - Central European Institute of Technology (CZ.1.05/1.1.00/02.0068) and FNUSA-ICRC (CZ.1.05/1.1.00/02.0123) from European Regional Development Fund and by junior inter-faculty research FAST/FEKT-J-13-1987 "Matrix optical sensors data fusion" of internal grant system BUT.


